以下轉載文章授權來源於 微波雜誌
作者: Tero Kiuru 和 Henrik Forstén,VTT Technical Research Centre of Finland Ltd.,Espoo,芬蘭
雷達使用反射的無線電波來確定物體的距離、角度或速度。這些探測系統曾經是航空航太和國防工業的專屬領域,現在在消費領域也越來越受歡迎,最引人注目的是用於自我調整巡航控制和自動駕駛輔助系統的汽車雷達應用。1 現代的頻率調製連續波 (FMCW) 系統中的類比和射頻硬體比原來的脈衝多普勒雷達複雜得多,而且商業應用是可能的,部分原因是大批量的半導體工藝,如 SiGe 和 CMOS 技術,這使得大規模商業應用的系統具有高成本效益。
本文介紹了一種用於商業雷達應用的 60 GHz FMCW、頻分複用 (FDM)、MIMO 雷達系統。2 這種獨特的結構使發射 (Tx) 和接收 (Rx) 通道的總數可以通過系統中的積體電路數量來擴展,同時仍然保持通道之間的相位一致性。這種方法提供了高幀率的測量、出色的相位穩定性和大視場 (FoV)。雷達結構和積體電路的設計使該系統可以擴展到更大的雷達系統。
本文中的雷達系統的預期用途是在雷達本身可能移動時對附近的移動物體進行短距離、高解析度的探測,意在捕捉人流量、無人機和其他自主系統。此外,該系統可以支援同時進行定位和測繪、物體探測 (如汽車) 和醫療應用的遠端多目標生命體征測量。FDM 被確定為滿足高解析度要求的最佳選擇,因為碼分多工太複雜,而對快速移動物體的精確跟蹤要求使時分多工不切實際。此外,FDM 允許精確的相位測量,這支持醫療應用,如通過檢測胸部的微小運動來遠端監測心跳和呼吸速率。
60 GHz FMCW MIMO 雷達
對雷達系統的要求包括大於 200 赫茲的快速成像、小於 5 釐米的距離解析度、多目標採集、移動目標能力和對微動的高靈敏度——所有這些都在一個小的、輕的、低成本的空間裡。該系統的規格為:
 |
1.5 度角解析度,8 通道 Tx – 8 通道 Rx MIMO |
|---|---|
|
3 至 5 釐米的距離解析度 |
|
160 度的水準焦距 |
|
25 度的仰視焦距 |
該系統對靜止的人類大小的物體提供 20 至 25 米的最大探測距離。應用背景減法,這一距離對移動目標增加到 60 米。該系統還支援同時探測多個移動物體,而無需物理掃描天線。還可提供具有 160 x 160 度視場的三維系統。
雖然雷達系統提供了許多潛在的使用模式,但多人生命體征提取能力對未來的應用很有意義。對於資料分析,雷達技術的速度是關鍵,因為它在不支援視覺圖形的情況下可以以每秒 200 幀 (FPS) 的速度運行,而在有視覺化的要求下可以達到 50 到 100 幀。
FMCW 操作
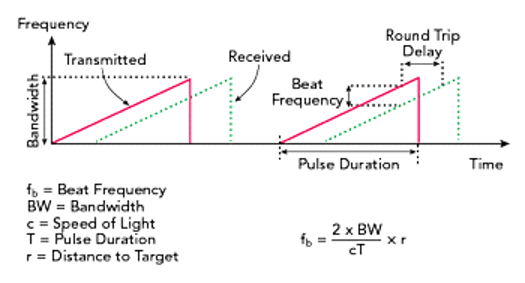
圖 1: FMCW 鋸齒形波形。
傳統的脈衝雷達透過發射一個短脈衝並觀察返回的目標回波的飛行時間來探測目標的距離。這就要求雷達具有較高的暫態發射功率,並常常導致設備具有龐大、昂貴的物理結構。FMCW 雷達透過發射一個用低頻波形調製的連續微波信號,如週期為 T 的鋸齒函數,其持續時間遠遠大於回波的返回時間,用更小的暫態發射功率和尺寸達到類似的效果 (見圖 1) 。
與脈衝雷達不同,FMCW 系統同時發射和接收,消除了脈衝雷達中的接收器在發射過程中被關閉時出現的盲區。FMCW 系統可以探測到離雷達非常近的物體的反射信號,使其可以測量到幾釐米的距離。該系統實現了出色的測距解析度,它與頻寬的倒數成正比,即 Δx=c/(2Δf),並且在狹窄的中頻 (IF) 頻寬下實現了高信噪比。
圖 2 是在 Cadence® AWR Design Environment®,特別是 AWR® Visual System Simulator™ (VSS) 系統設計軟體中實現的系統簡化圖。信號源被劃分在 Tx 和 Rx 兩端。Tx 功率放大器 (PA) 和 Rx 低雜訊放大器 (LNA) 鏈路的細節——圖中沒有顯示——可以進一步開發。Tx 和 Rx 的信號路徑必須很好地隔離才能正常運行,這影響了某些設計方面,並限制了 Tx 功率。否則,來自 Tx 端的功率將洩漏到 Rx 電路中,可能會使 LNA 和 / 或下變頻混頻器飽和。
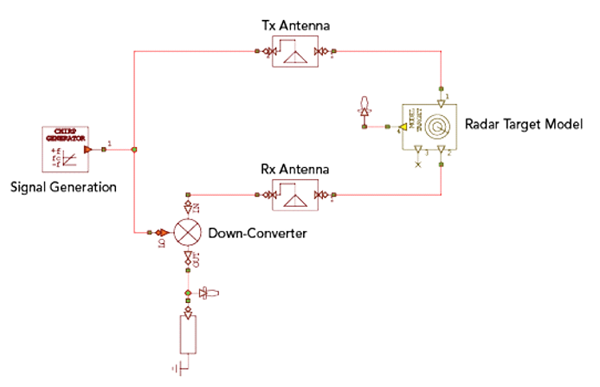
圖 2: VSS 中的簡化 FMCW 雷達。PA、LNA 和單個 MIMO 通道未顯示。
模擬圖說明瞭信號在 Tx 和 Rx 天線之間通過 VSS 雷達目標模型進行輻射,該模型包括 RCS、距離、速度和環境條件等屬性。混頻器將對目標反射的信號進行下變頻,使用壓控振盪器 (VCO) 的掃頻作為本地振盪器。取這兩個信號之差,形成一個與目標距離成正比的節拍信號。這個中頻被送入一個模數轉換器 (ADC) 進行信號處理,該轉換器使用快速傅裡葉變換演算法提取目標距離。使用多根天線,傅裡葉變換還支援數位波束成形,以產生被探測物體的二維圖像。
為什麼是 FMCW MIMO?
開發人員選擇了一個 FDM MIMO 架構來解決快速成像和高解析度的多個目標的技術要求。使用 MIMO,物理單元的數量可以大大減少。對於具有 Nt 個 Tx 元件和 Nr 個 Rx 元件的 MIMO 雷達,從 Tx 陣列到 Rx 陣列有 Nt x Nr 個不同的傳播通道。因此,只用 8 個 Rx 和 8 個 Tx 通道就可以合成 64 個虛擬通道,這大大降低了系統的複雜性、規模和成本。
FDM 從每個發射器同時發射不重疊的頻率,因此不同的發射器信號可以在接收器處被分離。3 在本設計中,頻率掃描或線性調頻是在 Tx / Rx 通道外使用一個 10GHz 的鎖相環 (PLL) 信號發生器產生的,它為一個 6 倍的頻率乘法器饋送信號。直接數位合成器產生低頻、同相和正交 (I/Q) 調製信號,每個單獨的 Tx 通道的頻率偏移為 1MHz。外部 ADC 將下變頻接收信號的中頻信號數位化。

圖 3: 具有兩個 Rx 和兩個 Tx 通道的概念性系統。
由於 FDM MIMO 天線同時發射,所有的 Rx 通道都將收到被恒定頻率偏移隔開的所有 Tx 信號。解調器使用原始線性調頻頻率作為本地振盪器 (LO) ,向下轉換含有頻率偏移的信號,這是由於信號從目標上反射的延遲造成的。Tx 通道在數位後端被分離。雖然這種方法可以通過同時測量所有的 MIMO 通道來處理移動目標,但由於中頻信號頻寬較寬,它需要在每個 Tx 上有調製器來轉移發射頻率和更快的 ADC。圖 3 是一個概念性的系統框圖,顯示了兩個 Rx 和兩個 Tx 通道。
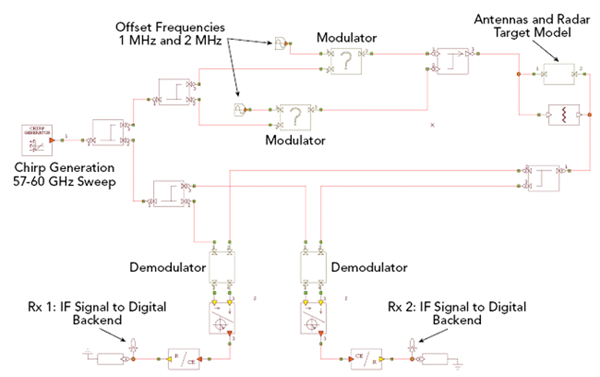
圖 4: FMCW MIMO 雷達框圖。
系統設計、驗證
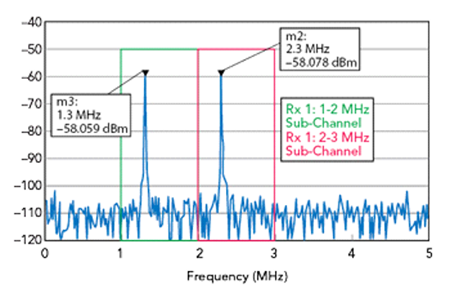
圖 5: 模擬的下變頻信號。
VSS 軟體被用來研究 MIMO 雷達的主要系統級方面。該軟體提供了信號源、LNA、混頻器、PA、倍頻器、天線和雷達目標的框圖表示 (見圖4) ,使設計人員能夠調整和優化關鍵參數,並隨著更多電路級細節的加入而納入雷達系統的實際操作。VSS 軟體類比了兩個 Rx 下變頻器通道的中頻輸出。使用圖 1 中的公式,在 57 至 60GHz 的 3GHz 頻寬 (BW) 的頻率掃描中,差拍頻率 (fb) 為 300kHz,脈衝持續時間 (T) 為 1ms,目標距離 (r) 為 15m。類比 Tx 1 的 Rx下變頻信號 (圖1中的綠色線) 為 1 + 0.3 = 1.3 MHz,Tx 2 的 Rx 下變頻信號 (圖 1 中的紅色線) 為 2 + 0.3 = 2.3 MHz (見圖 5) 。
RFIC 設計和分析
Tx 和 Rx 射頻積體電路是雷達系統的核心。每個都在非常小的區域內包含四個通道 (見圖 6) ,另外的 IC 可以被添加到系統中以增加通道的數量。一個 RFIC 支援多個通道是很有利的,這樣可以降低裝配的複雜性,並支援擴展一個有大量通道的系統。獨立的 Tx 和 Rx IC 可以實現獨立的 Tx / Rx 擴展,降低 Tx 和 Rx 之間的洩漏,並支援更靠近饋電結構,以減少印刷電路板 (PCB) 的損耗。一個單一的外部 VCO 和 PLL 提供了分配給所有 RFIC 的 LO 信號,從而產生了出色的相位雜訊相關性。一個 10GHz 的外部信號用於在 PCB 上佈線,因為在一個有許多通道的系統中佈線一個 60GHz 的 LO 會很困難。這個 9.75 至 10.25 GHz 的線性調頻被乘以 RFIC 的工作頻率。
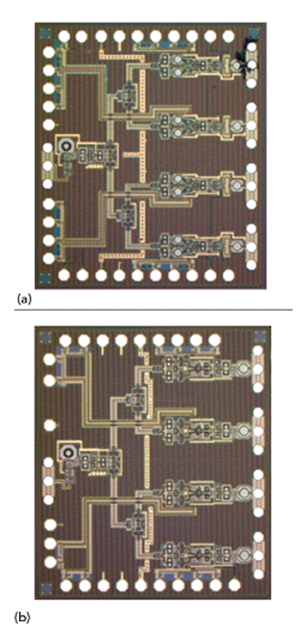
圖 6: Tx IC (a) 和 Rx IC (b) ,每個都有四個通道。
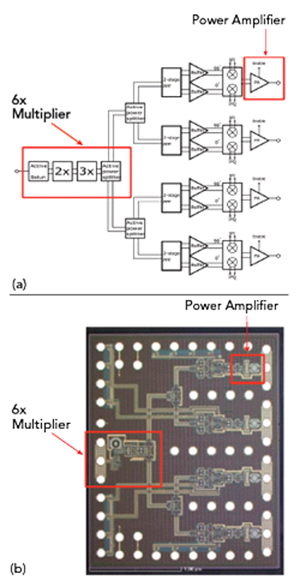
圖 7: 四通道 Tx 框圖 (a) 和 IC 佈局 (b) 。
AWR Microwave Office 電路設計軟體與 AWR AXIEM® 電磁 (EM) 模擬器一起使用,利用 AWR 軟體可用的 IHP SG13S SiGe 工藝設計套件 (PDK) 從電晶體層面設計 Tx 和 Rx 積體電路。用於毫米波應用的 SG13S 130 納米 SiGe 雙極 CMOS 工藝具有高速 HBT,fT = 240 GHz,fmax = 330 GHz。
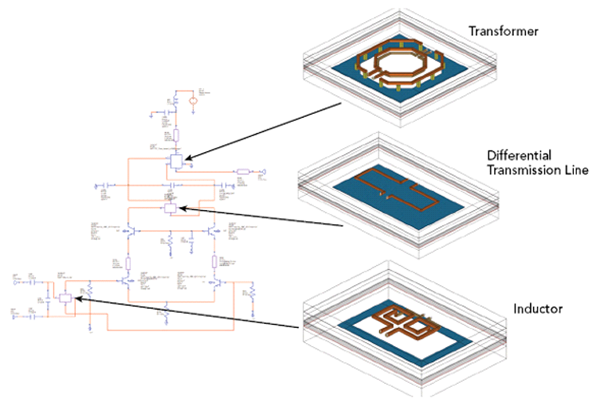
圖 8: 帶有變壓器、差分傳輸線和電感器佈局的 PA 電路圖。
圖 7 顯示了四通道 Tx 射頻積體電路和實際 Tx 晶片的框圖。有源巴倫、6倍諧波乘法器鏈路 (2 倍和 3 倍乘法器級聯) 和一個元件的功率放大器被突出顯示,以顯示它們在 RFIC 的位置。三個有源功率分配器將信號分成對稱的四路,每路供給一個兩級多相濾波器,產生 90 度相移的 I 和 Q LO 信號。功率分配器之後是緩衝放大器、I/Q 調製器和功率放大器。圖 8 顯示了 PA 的電路圖,它是使用 Microwave Office 的代工廠 PDK 的元件開發的,突出了變壓器、差分傳輸線和電感器。與波長相比,這些無源結構的電容量很大,需要使用 AXIEM 求解器進行電磁分析和優化。在電路圖中,電磁元件被嵌入為子電路,以便與 Microwave Office 共同模擬。通過包括電磁分析與晶片級放大器的 PDK 模型相結合,在測量性能和模擬性能之間產生了很好的一致性 (見圖 9) 。
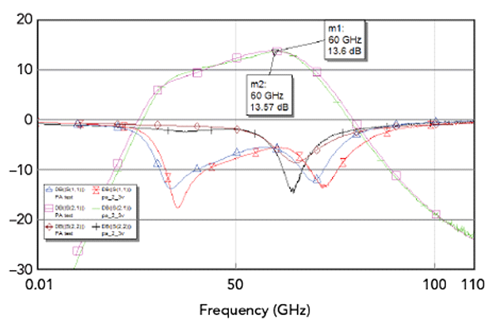
圖 9: 模擬與實測的 PA 增益,|S11| 和 |S22|。

圖 10: 6 倍乘法器電路圖。
假設輸入頻率為 10GHz,偏壓為 2.4V,對輸出端的有源巴倫、諧波乘法器鏈和有源功率分配器 (見圖 10) 進行了模擬。圖 11 所示的模擬結果為乘法器的運行提供了有用的見解,使人們能夠瞭解所產生的雜散信號的功率水準。從雷達設計的角度來看,掌握這些資訊對抑制這些雜散信號是有益的,這就需要採取額外的設計步驟來微調電路。
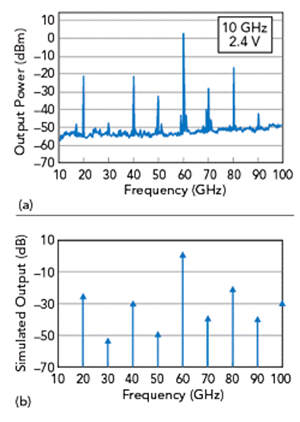
圖 11: 6 倍乘法器的實測 (a) 和模擬 (b) 輸出。
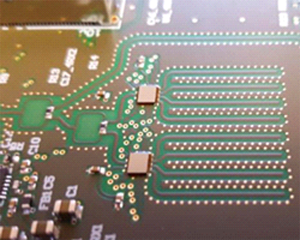
圖 12: 使用兩個 Rx IC 的八個 Rx 通道的 PCB。
MIMO 雷達測量結果
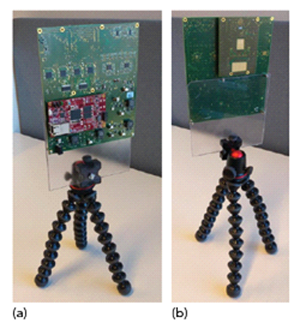
圖 13: 雷達系統 PCB 的背面 (a) 和正面 (b) 視圖。
接收器的射頻部分 (見圖 12) 顯示了由安裝在 PCB 上的兩個 Rx RFIC 倒裝片支持的八個 Rx 通道。高速信號處理後端的正面和背面,安裝在實驗室測試用的支架上,如圖 13 所示。接收器的相位和振幅是用單點目標測量來校準的。相位和振幅的修正係數是確定的,所以點目標測量提供了一個正確角度的點靶心圖表像。
二維多輸入多輸出雷達的「人流」測量驗證了它能以 100 到 200 FPS 的速度同時探測到多個人 (見圖 14) 。演示的距離解析度為 3 至 5 釐米,角度解析度為 3.5 度。在圖像形成過程中,在測距方向上採用了漢明開窗函數,在方位角方向上採用了 -25 dB 的側葉水準泰勒窗。泰勒開窗函數略微降低了角度解析度,但降低了側波水準,使圖像能夠以更高的動態範圍形成。在生成的圖像中,目標被很好地分開。
精確的相位測量在測量目標的非常小的運動時非常有用——例如,利用胸部的位移來確定人的心跳和呼吸頻率。頻率複用比時間複用的測量有優勢,因為所有的通道都是在同一時間測量。這在雷達多人心率變異性 (HRV) 提取中可以看到,如圖 15 所示。可以從雷達信號中觀察到生命體征,如心率、心率變化和呼吸。
結論
本文描述了一種用於商業應用的新型 60 GHz MIMO FMCW FDM 雷達的設計。該系統提供了高幀率的測量、出色的相位穩定性和大視場。獨特的結構和 RFIC 的設計使該系統可以擴展到更大的雷達,同時保持各通道之間的相位一致性。二維和三維成像系統已被展示,據作者所知,這是第一個三維成像、毫米波、頻分 MIMO 系統。
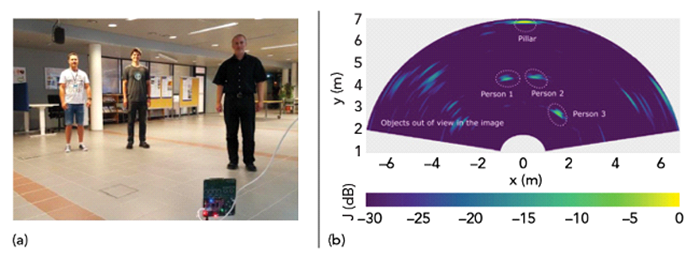
圖 14: 雷達視場中的三個人 (a) 和產生的圖像 (b)。
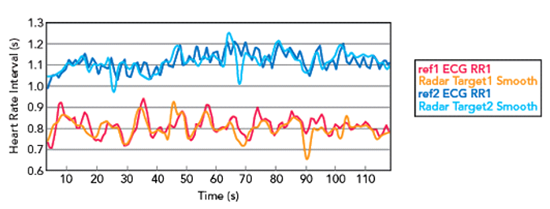
圖 15: 多人心率和心率變化提取的結果。
參考文獻
|
J. Hasch, E. Topak, R. Schnabel, T. Zwick, R. Weigel and C. Waldschmidt, "Millimeter-wave Technology for Automotive Radar Sensors in the 77 GHz Frequency Band, " IEEE Transactions Microwave Theory and Techniques, Vol. 60, No. 3, March 2012, pp. |
|---|---|
|
H.Forsten, T. Kiuru, M. Hirvonen, M. Varonen and M. Kaynak, "Scalable 60 GHz FMCW Frequency-Division Multiplexing MIMO Radar, " IEEE Transactions Microwave Theory and Techniques, Vol. 68, No. 7, July 2020, pp. |
|
Pfeffer, R. Feger, C. Wagner and A. Stelzer, "FMCW MIMO Radar System for Frequency-Division Multiple TX-Beamforming," IEEE Transactions Microwave Theory and Techniques, Vol. 61, No. 12, December 2013, pp.4262-4274. |
本文使用了 Cadence AWR Design Environment 軟體套件中的設計圖例。作為開放式平臺,AWR Design Environment 可為射頻/微波工程師提供創新的高頻電路、系統和電磁 (EM) 分析技術,以設計基站、手機和衛星通信等各類無線產品。AWR Design Environment 平臺具備如下優勢:
|
直觀的使用模型提供非凡的使用者體驗 (UX) |
|---|---|
|
穩健的模擬技術有助於提升速度和準確性 |
|
開放式設計流程可為協力廠商工具提供資料導入 / 匯出支援 |
歡迎點擊 AWR Design Environment 產品手冊,免費下載了解更多!
本文授權轉載出處

歡迎關注 Graser 社群,即時掌握最新技術應用資訊


