《 產業觀察 | 自動駕駛與汽車半導體的未來之路 》一文介紹了 Cadence 的汽車峰會,本文將聚焦于無人駕駛車輛的關鍵零件之一:感測器。

在 Cadence 汽車峰會上,Uhnder 的首席執行官 Manju Hegde 對感測器進行了精彩的概述,重點介紹了攝像頭、雷達和光學雷達(簡稱光達)等核心感測器的零件。
感測器要求
Menju 列出了關於感測器的十一個關鍵要求:
1. |
感應範圍: |
|---|---|
應能充分適應車速。 |
|
2. |
視野(FoV): |
足夠寬闊以展示全景視野。這裡的一部分原因是由自動緊急制動規則—— AEB 2018 所驅動的,而由於 2020 和 2022 對視野的要求更高,要求車輛能夠在交叉路口避免發生碰撞,因此現在需要更寬的 FoV。 |
|
3. |
角度: |
角度檢測和解析度應滿足檢測相關特徵的要求。這個問題在於雷達識別人類的能力相對較弱(雷達對玻璃纖維帆船的識別能力也相對較弱,所以人們在桅杆頂部設置了一個特殊的反射器)。 |
|
4. |
速度: |
測量並解析移動物體的速度。雷達可以做到這一點,但大多數光學雷達不能直接做到這一點,它們可以透過測量一段時間內幀與幀之間的差異來間接實現這點。 |
|
5. |
分類: |
雷達在這方面的能力比較欠缺。美國軍方擁有每架敵方坦克和飛機的雷達標記,並採用了機器學習。雷達在探測範圍內很難識別物體類型(樹、行人、汽車等)。 |
|
6. |
顏色: |
顏色對交通信號燈來說尤為重要,部分色盲者只能在距離交通信號燈足夠近的情況下通過亮燈的位置來進行判斷。 |
|
7. |
信號處理用度: |
從獲得原始感測器資料到得出「這是個小孩」或「這是一個消防栓」等結論,中間涉及大量的信號處理和圖像分類工作。 |
|
8. |
運行: |
當所有照明燈(日間和夜間行車燈)打開時,或在惡劣天氣中時,運行其全部功能面臨著巨大的挑戰。 |
|
9. |
惡劣天氣: |
雨、霧、雪。即使是人類,在惡劣天氣狀況下也會遇到麻煩。 |
|
10. |
干擾: |
存在兩種干擾類型,分別是環境干擾和其他感測器干擾。攝像頭比人眼更容易因受到圖像信號干擾而產生混亂。車上有多個雷達和光學雷達單元。雷達發出的信號通常隨距離的平方而減弱,並且返回的反射波也會隨距離的平方而減弱(從目標處開始計算),因此雷達的感應範圍是距離的四次冪。因此,當一輛駛向我們的汽車在 R2 處充滿雷達信號,而我們又正在 R4 對其進行探測時,就很容易因為干擾而產生混亂。再加上每輛車可能有 4-6 個雷達,產生的干擾就更大了。 |
|
11. |
成本: |
關於何時可運用無人駕駛汽車的預測,部分取決於成本。谷歌 / Waymo 可以製造幾輛無人車在鳳凰城行駛而不關心其成本,但降低感測器成本對批量生產至關重要。而降低成本最終還是需要依靠技術,才能將感測器運用到售價 2 萬美元的汽車中。 |
感測器類別
三種感測器類別分別是視覺感測器(攝像頭)、雷達和光學雷達。
 |
視覺感測器: |
|---|---|
汽車所需的 CMOS 圖像感測器(CIS)與消費性電子產品不同(消費性電子產品所需的 CMOS 圖像感測器主要關注於製作好的Instagram圖像)。汽車需要擁有高動態範圍和更好的低光靈敏度的圖像感測器,其應有更高的圖元、更低的解析度、更快的回應時間,並能同時滿足在更高和更低溫度下工作的性能需求(智慧手機要適應口袋的溫度,而汽車則需適應像沙漠和雪山那樣的極端氣候)。顯而易見,攝像頭有一個很大的缺陷:即與人類在夜間行車時一樣,其視野受到車輛前照燈的限制。同時,攝像頭需要一直保持清潔,這是另外一個問題。 |
|
|
光學雷達: |
現在市面上有大量不同類型的光學雷達(甚至比利用光學雷達的方式還多)。對於汽車而言,目前樣車使用的是機械掃描光學雷達,但從長遠來看,使用 MEMS 微振鏡或光學相控陣的固態光學雷達是重點發展目標。光學雷達的運用存在一個小問題,即使用波長為 850-940nm 的近紅外光雷達成本最低,但這種雷達會對眼睛造成傷害,且需要在有太陽光的環境中使用。波長為 1550nm 的雷達性能更高,這種雷達的許用能量比近紅外光雷達高 5 個數量級(500,000 倍而不是 5 倍),所需的太陽光比近紅外光雷達低 10 倍,但是成本十分昂貴。其加分項在於角度解析度很高,但在遇到反光性很差的物體和霧 / 雨 / 雪天氣時也會出現問題;同時,清潔也是一個需要注意的問題。 |
|
|
雷達: |
目前所有的雷達都使用模擬 FMCW(調頻連續波)發送線性調頻脈衝,這種脈衝與接收到的反射波混合,之後降低速度至基頻帶,再使用低通濾波器。有一個問題是,車上需要有多個雷達單元,但每次只能有一個雷達單元發射信號,因此有必要進行時分多工(基本上,每次只有一個信號繞每個雷達旋轉)。 |
優勢和不足

以上是各個感測器類型的蜘蛛圖。左方是雷達圖,中間是光學雷達圖,右方是視覺感測器圖。
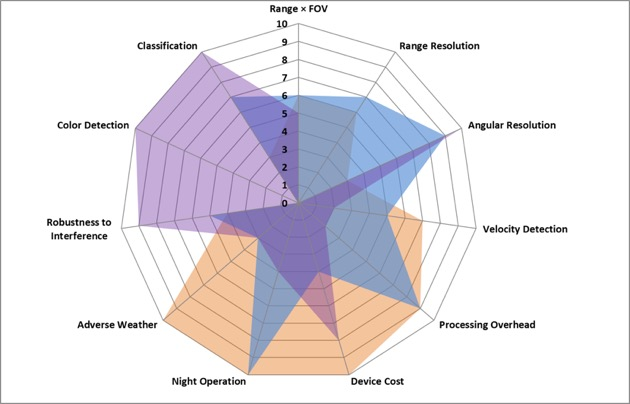
這些感測器都很重要,因為如果我們同時使用這些感測器,那麼一種感測器的優勢就可以彌補另一種感測器的不足。雷達無法判斷交通燈是紅色還是綠色,但是視覺感測器可以;視覺感測器在大霧天看不清楚,但雷達可以;諸如此類……但是這些感測器離人們的需求仍有很大差距。
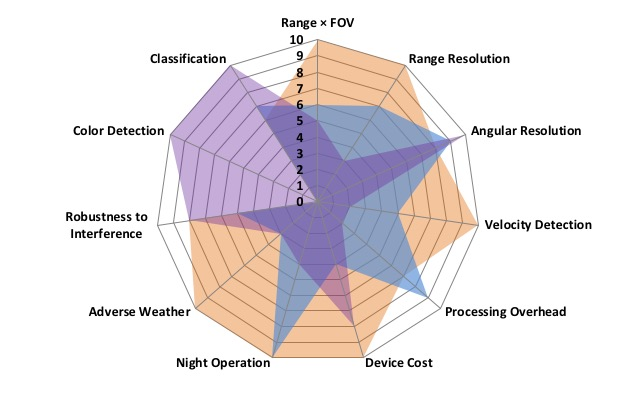
新一代雷達
「如果我們對雷達感測器進行改造會怎麼樣?今天的雷達都是為探測大型目標而設計的。現在,很多公司都在研究對雷達感測器進行改造這個問題。」 Manju 表示。

如果我們的雷達具有更大的感應範圍,更高的解析度(垂直和水準方向),非常靈敏的速度檢測,更好的明暗目標比率和更強的抗干擾性,那麼將對現在的雷達帶來極大改變,如上面的蜘蛛圖所示。
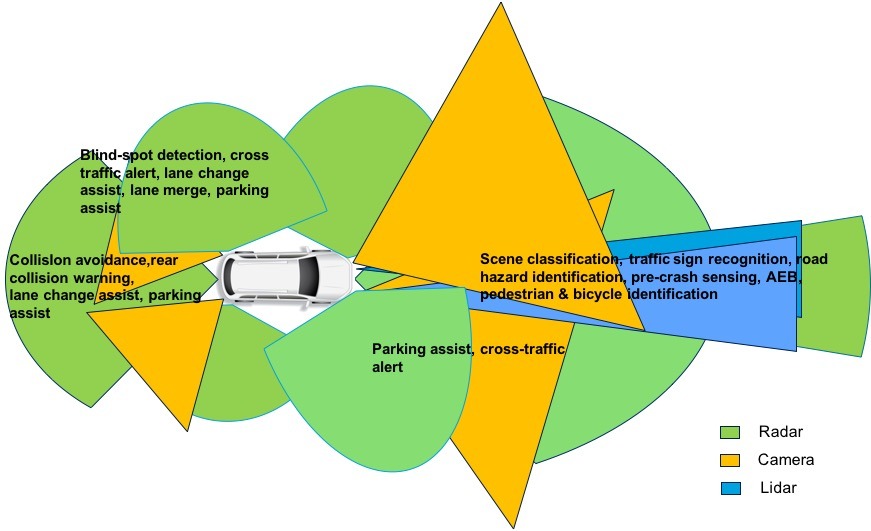
更重要的是,這將縮小與人類需求之間的差距。事實上,這些改造將大大縮小這一差距,從而使光學雷達具有邊際價值。對於快速駕駛,車頭仍然需要安裝光學雷達,以檢測道路上的障礙物(如一塊木頭);對於這類障礙物,雷達無法進行反射,而攝像頭也無法及時檢測。但是總體而言,所需的光學雷達數量會減少。
是新一代雷達將是一個絕佳的解決方案:透過取消多個光學雷達,我們將從成本上獲益。Menju 的未來發展藍圖如下圖所示(綠色部分代表 Unhder 正在開發的雷達):
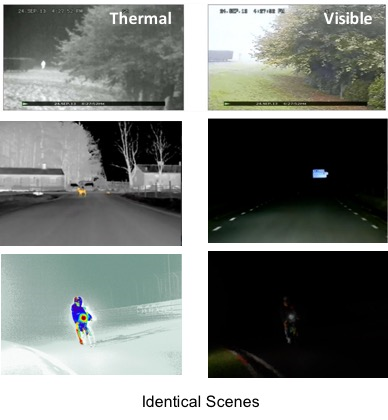
溫度感測器
Owl Autonomous Imaging 公司的 Chuck Gershman 提出了第四種感測器類型:溫度感測器。其一大優勢在於可以探測到活物,而且可以在白天和夜晚照常工作,還能應對各種天氣狀況。
僅僅使用光學雷達並不能滿足我們的需求,光學雷達雖然能看到物體,但無法對此做出判斷。此外,光學雷達的感應範圍在惡劣天氣下嚴重降低。特別是 905nm 的光學雷達,在霧和雨中會完全失去感應能力。貓頭鷹公司已研發出一款焦平面陣列(FPA)雙色探測器,並將其交付給空軍使用。
正如 Chuck 在結束演講時所說的:「我們的感測器能直接看到活人。」
《華爾街日報》關於感測器的報導

《華爾街日報》曾發表過一篇關於汽車感測器的文章:
「在低能見度條件下,包括在日落之後,攝像頭在捕捉環境圖像方面效果不佳。然而,光學雷達和雷達不受黑暗的影響,因為它們透過波長大於和小於可見光的各種電磁波收集有關環境的資訊。」
其實,人眼也是如此工作的。我們通常透過在車輛前部放置高強度可見波長光源產生器,並查看其反饋回來的內容來解決這個問題。而這些光源產生器被稱為前照燈。光學雷達和雷達並非由於所使用的波長而不受到黑暗的影響,而是因為它們已經做了類似的事情,發出電磁輻射脈衝,然後查看其回饋回來的內容。
引用一句話:
「滾珠軸承用於將感測器固定在汽車頂部,而在不平坦的路面上行駛會影響光學雷達的校準,並導致滾珠軸承過度磨損。車輛遇到這些情況的次數越多,光學雷達感測器需要更換的頻率就越高。」
目前,放置於車頂上的大型旋轉式光學雷達並未被真正提議作為進行商業批量生產的解決方案。它們的成本比汽車的其他零件都要高,這些只是實驗平臺。如上所述,若想進入經濟上可行的商業生產,我們需要一個沒有滾珠軸承和其他配件的固態光學雷達解決方案。

譯文授權轉載出處
長按識別 QRcode,關注「Cadence 楷登 PCB 及封裝資源中心」

歡迎關注 Graser 社群,即時掌握最新技術應用資訊


